본 페이지는 CAN 통신 설정 방법 및 CAN Message에 대해 기술한다.
환경 설정
Driver 설치
OS에 맞는 KvaserCAN Driver를 설치한다.
Driver 설치를 마친 후 MORAI SIM을 실행한다.
CAN Device는 MORAI SIM을 실행 전에 연결한다.
CAN Network
 CAN Network와 다른 네트워크(ROS, UDP, Apollo, Autoware 등) 동시 연결 불가.
CAN Network와 다른 네트워크(ROS, UDP, Apollo, Autoware 등) 동시 연결 불가.
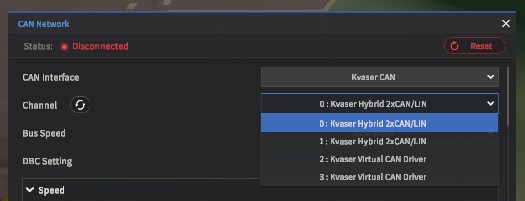
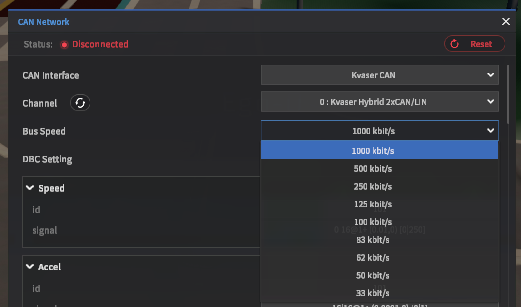
Kvaser CAN을 이용하여 Ego Vehicle의 상태를 송신하며, Ego Vehicle을 제어 할 수 있다.
Channel, Bus Speed 를 설정 할 수 있으며 DBC - ID, Signal 값에 맞게 송·수신 할 수 있다.
Data Rate (Hz): 시뮬레이터의 화면 출력 주기와 동일한 주기로 출력된다.
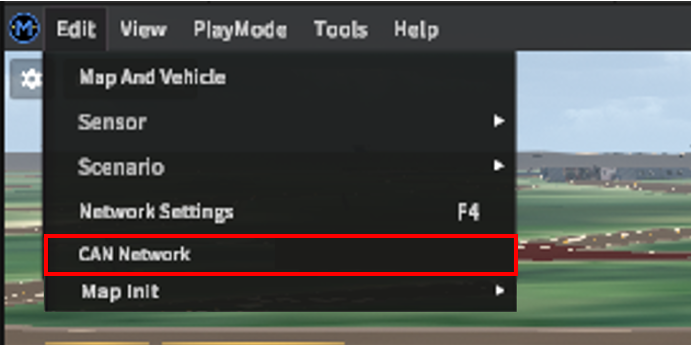
CAN Setting

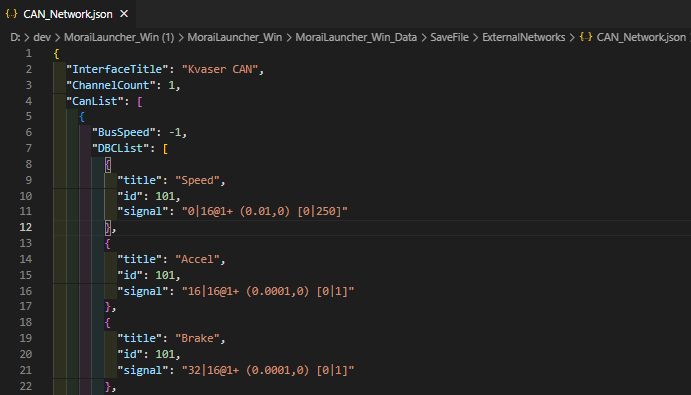
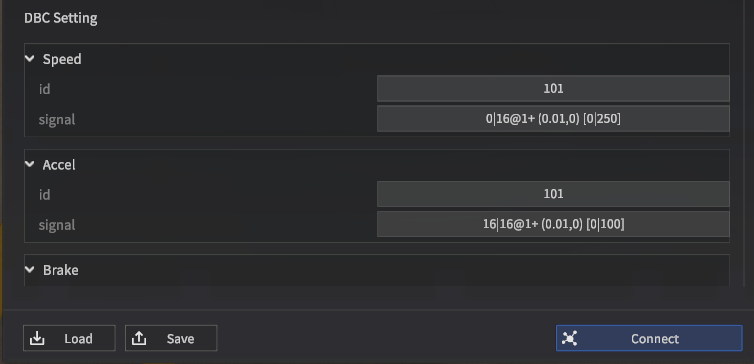
DBC Setting
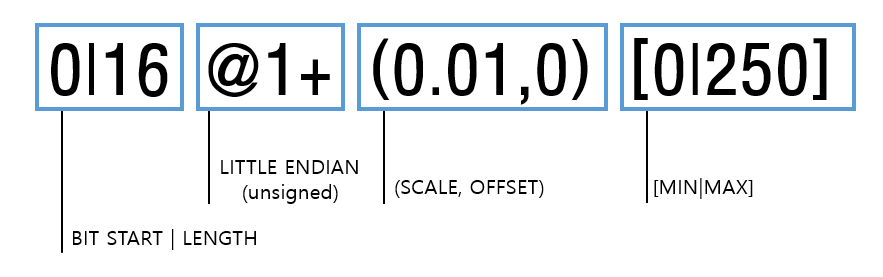
DBC ID, Signal 을 정의할 수 있다.
DLC는 8로 고정
MIN, MAX를 제외한 값으로 수정하여, 원하는 형태의 DBC로 송·수신 가능하다.
Sample_CAN_DBC.dbc
DBC Signal
Publisher Data
Speed
Ego Vehicle의 속력 값
Unit : km/h
Brake ( 0 ~ 1 )
Brake Switch
Accel ( 0 ~ 1 )
Steering Angle
Roll, Pitch, Yaw
Ego Vehicle의 회전을 나타내는 정보
Unit : deg
Turn Signal
Ego Vehicle의 방향지시등
0 : No Signal
1 : Left Signal
2 : Right Signal
Gear
Ego Vehicle의 Gear 정보
M : 0
P : 1
R : 2
N : 3
D : 4
L : 5
Subscriber Data
Ctrl Gear
Ego Vehicle의 Gear 명령
M : 0
P : 1
R : 2
N : 3
D : 4
L : 5
Ctrl Accel (0 ~ 1)
Ctrl Brake(0 ~ 1)
Ctrl Steering Angle
Ego Vehicle의 횡 방향 제어 명령
Unit : radian
+ 값이 왼쪽, - 값이 오른쪽
Save & Load
CAN Network에서 설정한 차량 Parameter를 파일(.json)로 저장 가능함.
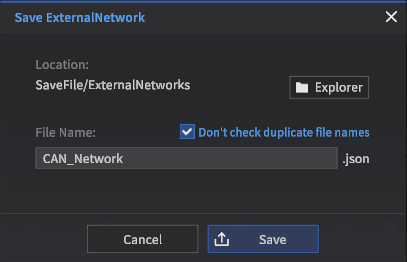
Save
저장한 파일 내 CAN Network Parameter 내역