Custom LiDAR 사용 방법
본 페이지는 현재 시뮬레이터에서 제공하는 LiDAR Sensor 외의 사용자가 정의한 LiDAR를 사용하는 방법을 소개한다.
Custom LiDAR Template 파일 작성
Custom LiDAR의 이름, Field of View, Rotation Frequency 등의 Template을 json 파일 형식으로 안에 적고 해당 디렉토리 안에 넣으면 시뮬레이터에서 Template대로 Custom LiDAR를 쓸수 있다.
Template json 파일 디렉토리 : SaveFile/LidarTemplate/Lidar.json
Template json 파일 예시 :
{ "Name": "Lidar128", "LaserCount": 128, "MinDistance": 0.5, "MaxDistance": 245.0, "RotationFrequency": 10.0, "MeasurementsPerRotation": 1800, "FieldOfView": 40.0, "VerticalRayAngles": [ -11.742, -1.99, 3.4, -5.29, -0.78, 4.61, -4.08, 1.31, -6.5, -1.11, 4.28, -4.41, 0.1, 6.48, -3.2, 2.19, -3.86, 1.53, -9.244, -1.77, 2.74, -5.95, -0.56, 4.83, -2.98, 2.41, -6.28, -0.89, 3.62, -5.07, 0.32, 7.58, -0.34, 5.18, -3.64, 1.75, -25, -2.43, 2.96, -5.73, 0.54, 9.7, -2.76, 2.63, -7.65, -1.55, 3.84, -4.85, 3.18, -5.51, -0.12, 5.73, -4.3, 1.09, -16.042, -2.21, 4.06, -4.63, 0.76, 15, -3.42, 1.97, -6.85, -1.33, -5.62, -0.23, 5.43, -3.53, 0.98, -19.582, -2.32, 3.07, -4.74, 0.65, 11.75, -2.65, 1.86, -7.15, -1.44, 3.95, -2.1, 3.29, -5.4, -0.01, 4.5, -4.19, 1.2, -13.565, -1.22, 4.17, -4.52, 0.87, 6.08, -3.31, 2.08, -6.65, 1.42, -10.346, -1.88, 3.51, -6.06, -0.67, 4.72, -3.97, 2.3, -6.39, -1, 4.39, -5.18, 0.21, 6.98, -3.09, 4.98, -3.75, 1.64, -8.352, -2.54, 2.85, -5.84, -0.45, 8.43, -2.87, 2.52, -6.17, -1.66, 3.73, -4.96, 0.43 ], "rotCorrections": [ 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354, 6.354, 4.548, 2.732, 0.911, -0.911, -2.732, -4.548, -6.354 ], "CenterAngle": 0.0, "TextureHeightFactor": 32, "TextureWeightFactor": 2 }CODE
현재 Custom LiDAR는 ROS 에만 사용 가능하며, Lidar.json 파일 명으로 저장된 템플릿만 사용이 가능하다.
Custom LiDAR 세팅
기존 3d LiDAR 처럼 Sensor텝에 들어가서 3d LiDAR를 선택한 다음, 추가한다.
LiDAR Setting Panel에 있는 “Model” 항목에 “Custom” 선택
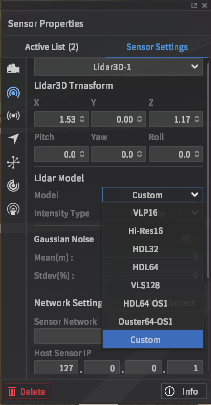
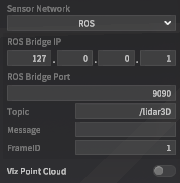
사용자가 쓰고 있는 ROS IP와 PORT, FrameID 등을 입력하고 Connect를 클릭하면 Custom LiDAR를 Ros로 사용할 수 있다. 이때 기본 ROS message 타입은 PointCloud2 이다.
위의 예시 Template 파일로 커스터마이즈한 Custom LiDAR의 Vizualization
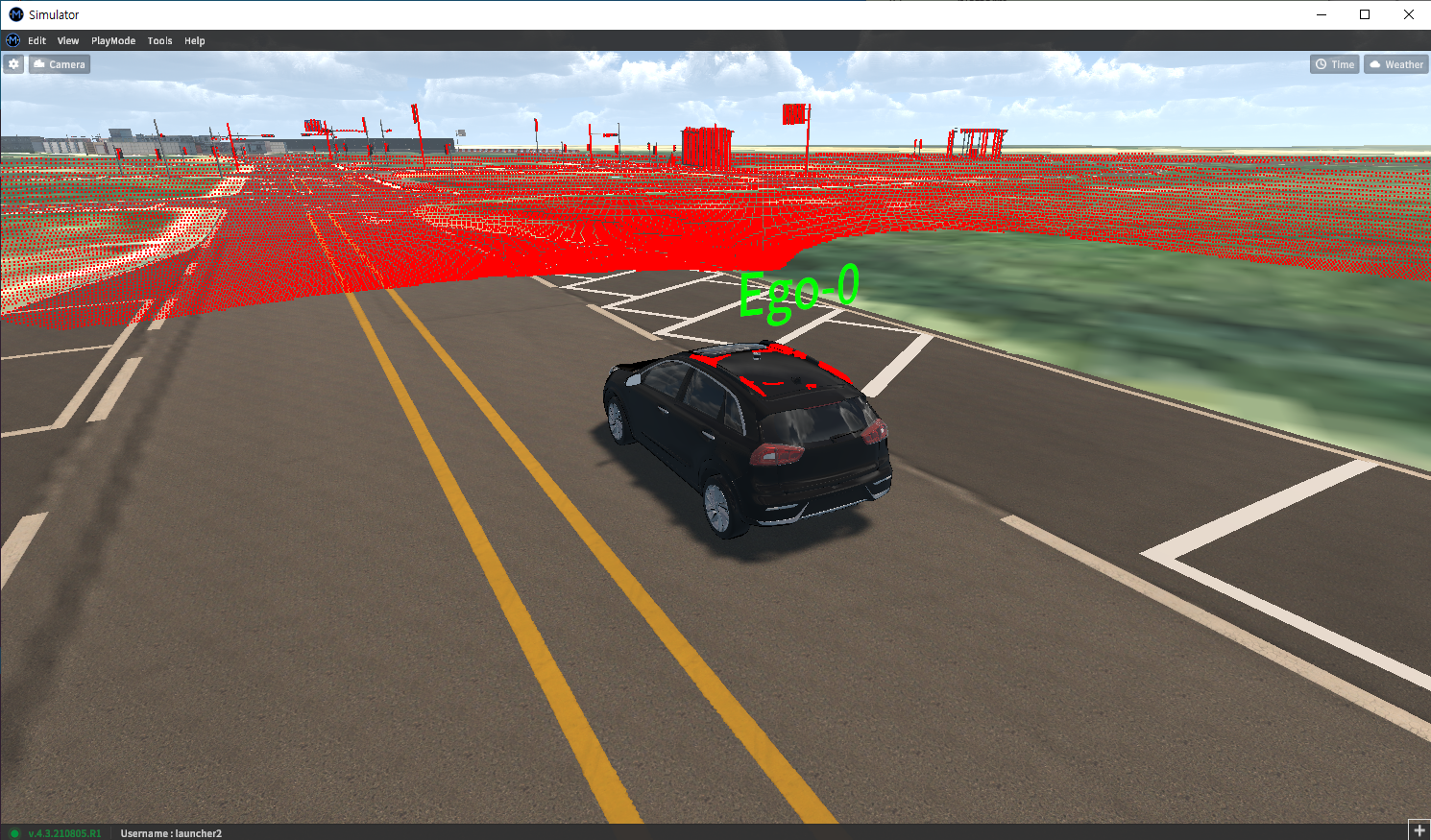
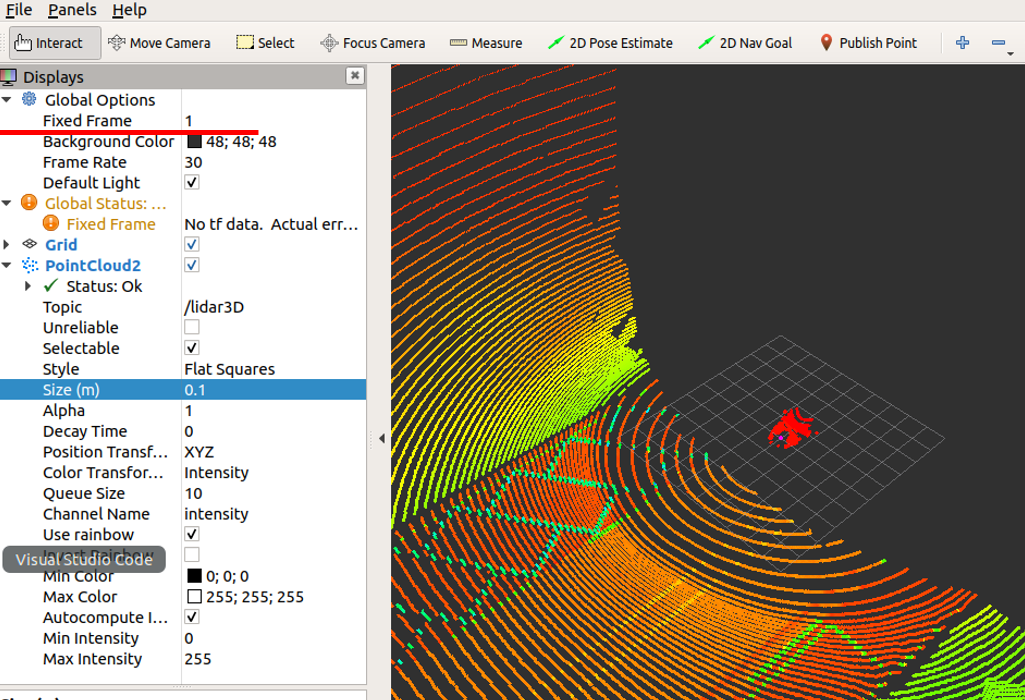
Rviz로 Vizualization한 모습. 다른 Sensor 들과 마찬가지로 ROS bridge를 통해 수신 받을 수 있다.
위의 Sensor Panel로 나온 FrameID와 똑같이 Fixed Frame에 적어주면 확인이 가능하다.