본 페이지는 Ego Vehicle 을 Vehicle과 같이 자율주행하게 만드는 옵션인 Cruise Mode 사용 방법에 대해 소개한다.
Cruise Mode 기능 사용법
Cruise Mode 설정은 Ego Vehicle을 클릭하여 나오는 Vehicle Info > Driving Info 창을 통해 확인할 수 있다.

Vehicle Info 창에서 ‘Cruise Mode' 항목 체크 시 아래와 같이 Cruise Mode가 활성화됨과 동시에 'Viz-Path’ 항목이 생성되는 것을 확인할 수 있다.

Vehicle Telemetry
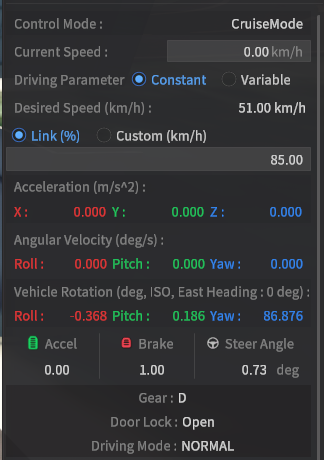
Control Mode : 현재 차량의 조작 모드(Cruise Mode 활성화 시 Cruise Mode로 표시함.)
Current Speed (km/h) : 현재 차량의 종방향 속력.
Driving Parameter
Acceleration (m/s^2) : 차량 좌표계 기준 선형 가속력를 표시.
Angular Speed (deg/s) : 차량의 각속력을 표시.
Vehicle Rotation (deg, ENU) : 동북상 좌표계 기준 차량의 회전 포즈를 표시.
Accel, Brake : Accel과 Brake의 정도를 표시 (1에 가까울수록 풀악셀/풀브래이크를 밟은 상태.)
Steer Angle (deg) : 차량의 스티어링 각을 표기.
Gear : 현재 차량의 기어 상태를 표기함.
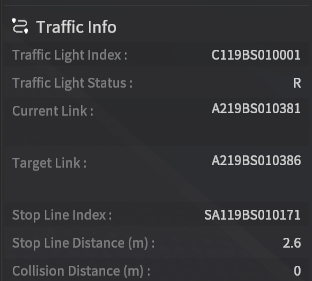
Traffic Info
Traffic Light Index : 차량이 마주하는 신호등의 Index.
Traffic Light Status :
Current Link : 현재 차량이 패스로 따라가고 있는 mgeo link의 Index.
Target Link : 현재 차량이 목표로 하고 있는 mgeo link의 Index.
Stop Line Index : 현재 차량이 마주하고 있는 정지선의 Index.
Stop Line Distance (m) : 현재 차량이 마주하고 있는 정지선과의 상대거리.
Collision Distance (m) : 앞에 충돌가능성이 있는 물체(차량, 장애물 등)와의 거리를 단위는 m이며 검색되지 않을 시 999로 표현함.