22.R1.1
Release Date | 2022/03/29 16:00 PM (GMT +9) |
Simulator | MORAI SIM: Drive ST |
Version | 22.R1.1 |
Release
R _ 2022.03.29 _ 22.R1.1
Updates
Map Update
R_KR_PR_SejongBRT0
중앙선 및 중앙분리대 구간에 시선유도봉 등 설치물 추가함.
터레인과 도로 표면 매쉬간 연결성 향상 작업 완료함.
NPC Parameters 차량 생성 - 개별 차량 생성하기
-NPC Parameter 다양화를 통해 고객 맞춤형 'NPC 차량 주행 환경' 제공함.Scenario Editor 사용성 개선 차량 생성 - 개별 차량 생성하기
-NPC 배치 효율화를 위해 'Random Vehicle' 및 '이전 배치 NPC 옵션 유지 기능' 추가함.MORAI Simulator gRPC API gRPC API
-UI를 사용하지 않고 gRPC를 이용하여 Simulator를 제어 할 수 있는 기능 제공함.
좌표 표시 기능 ■ 기타 시뮬레이터 기능 | 좌표 표시 기능
-Map에서 특정 지점의 위치 정보(x,y,z)를 표시하는 기능 추가함.
화면 저장 기능 ■ 기타 시뮬레이터 기능 | 좌표 표시 기능
-Simulator의 Main Camera의 현재 시점을 저장하는 기능 추가함.Object 회전각 정보(LiDAR Sensor Capture) Sensor Data Format
-AV(=Autonomous Vehicle)의 인지 성능 향상을 위해 LiDAR Sensor Capture 시 Object 회전각 정보 추가 제공함.
-Instance 파일(.txt)에 Yaw 외 Roll, Pitch 추가하여 Object의 3차원 회전각 모두 제공함.Tool Tip
-기능 Tool에 마우스 Over 시, Title과 Description로 구성된 설명 팝업창 활성화되는 기능 추가함.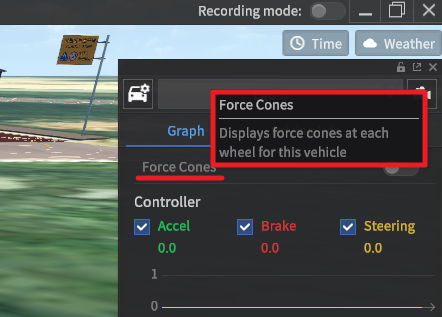
Force Cones
Obstacle Position 좌표 변환
-Obstacle 좌표계 ISO에서 ENU 좌표계로 수정함.Scenario Load 프로토콜 명칭
-KaistSLSubscriber에서 MoraiSLSubscriber로 Scenario Load 프로토콜 명칭 변경함.단축키를 통한 모드 진입
-기존에 사용하지 않던 F2, F3 등 단축키를 통해 모드 진입하는 기능 추가함.
-F1 Key를 통해 Keyboard Shortcut 항목 확인 가능함.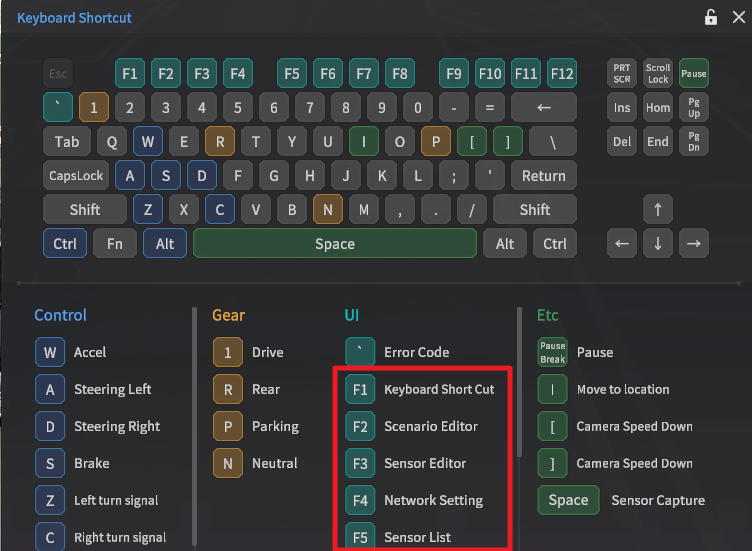
Keyboard Shortcut
MORAI SIM Verison Name
- 기존 [Main] [날짜] [LastVersion] 방식은 길고 가독성이 떨어짐. (ex. v4.7.211109.H7 )
- 정규 Release 발행이 앞으로 매 분기마다 이뤄지기에 Version Name 방식 변경함.
- 변경 후 [발행년도] [Release 분기] [LastVersion]. (ex. 22.R1.0 )
Bug fixes
Scenario File 호환성 시나리오 개요
-Simulator 최신 버전에서 이전 버전의 Scenario File(.json) Load 시 호환 가능하도록 개선함.Extra Asset Bundle Custom Map 생성 기능
-Custom Map 생성 시 StartPoint 지정 후에도 시뮬레이터 맵/차량 선택·실행 후 차량 추락하는 이슈 개선함.
-변경된 AssetbundleEditor.dll 파일 사용 필요함.SpawnPoint
-Spawnpoint로 NPC 차량 생성 시 설정한 Custom 및 Link Speed로 도달하지 못하는 이슈 개선함.Object Topic _ Pedestrian의 Velocity 정보
-ROS 통신 Object Topic에서 Pedestrian에 대한 Velocity 정보 출력하도록 개선함.차량 기어 (P단)
-일정 기울기 이상의 언덕길에서 차량이 P단에서도 뒤로 밀리는 이슈 개선함.3D LiDAR
-Sensor Capture 모드에서 Gaussian Noise 사용 시 3D LiDAR Intensity Type 모두 (Intensity, Semantic, Instance) 동일한 Distance을 갖게 개선함.
-Velarray H800/M1600, VLP32 모델 Sensor Capture 모드 값 출력 에러 개선함.R_KR_PR_Daejeon_KAIST 맵 관련 이슈
1) Link 방향 설정 오류 개선
-A2200910010100631 Link 위 NPC 차량 배치 시, 차량 Heading 방향이 도로 방향과 일치하도록 개선함.
2) Scenario 파일(.json) 저장 불가 오류 개선
-Scenario 구성 후 Scenario 파일(.json) 저장 가능하도록 개선함.2016_Hyundai_Ioniq(KAIST) Vehicle
-후진(R) 후 전진(D)에도 후진등이 꺼지지 않는 이슈 개선함.