MORAI SIM: Drive 예제 코드 안내 ROS 사용 예제
본 페이지는 MORAI SIM: Drive ROS 예제의 네트워크 세팅 법과 사용 코드를 소개한다.
파일 권한 부여
파일 실행 시 아래와 같은 오류가 발생 할 수 있다.
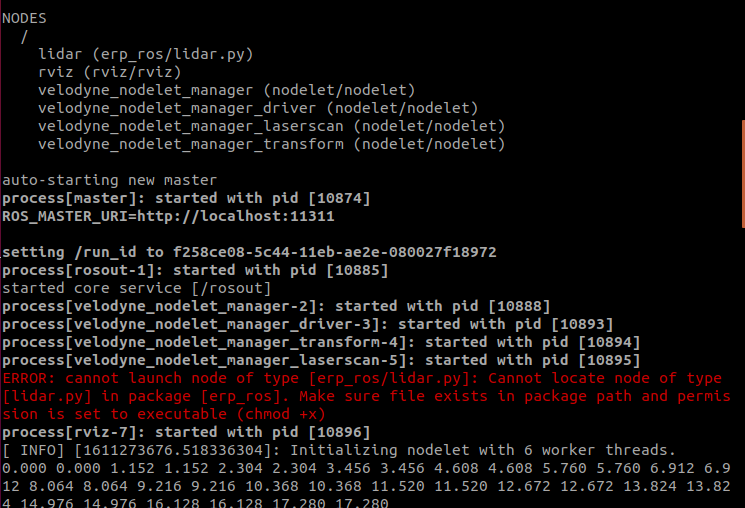
cd ~/catkin_ws/src/gen_ros/
chmod -R a+x scripts/
시뮬레이터 네트워크 세팅
시뮬레이터 네트워크 세팅
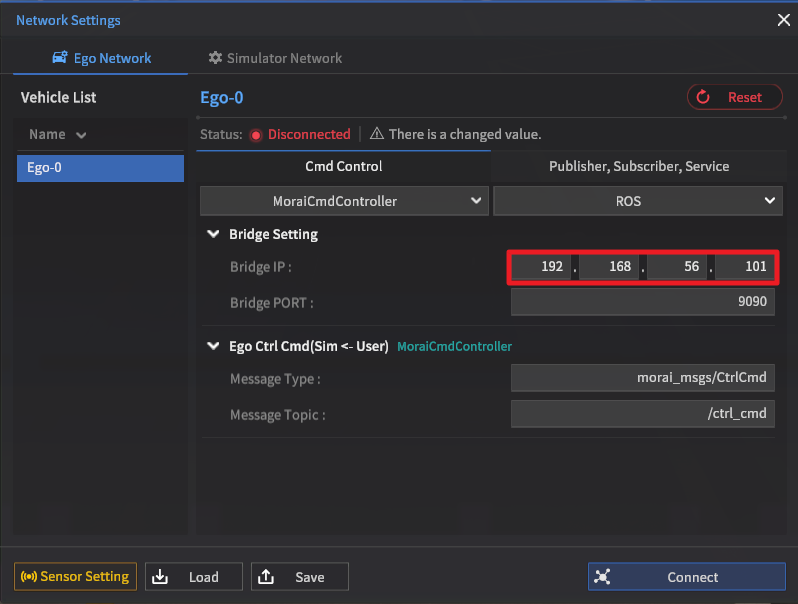
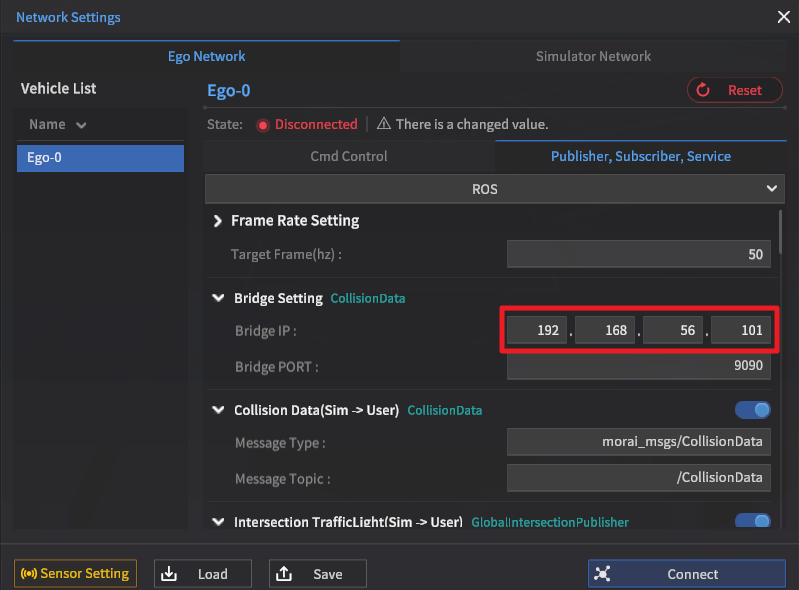
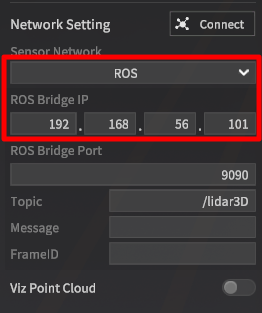
네트워크 세팅
$ roslaunch rosbridge_server rosbridge_websocket.launch
Local 환경에서 시뮬레이터를 실행시킨다면 Bridge IP 127.0.0.1 사용
Bridge IP를 아래와 같이 세팅 (가상환경 설치할때 세팅했던 IPv4 address)
센서 코드 테스트
라이다
시뮬레이터 센서 세팅은 아래와 같이 한다
$roslaunch rosbridge_server rosbridge_websocket.launch
$roslaunch gen_ros lidar.launch
Local 환경에서 시뮬레이터를 실행시킨다면 Sensor IP, DST IP 127.0.0.1 사용
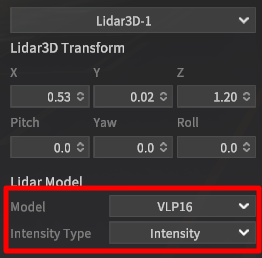
<시뮬레이터 센서 세팅>
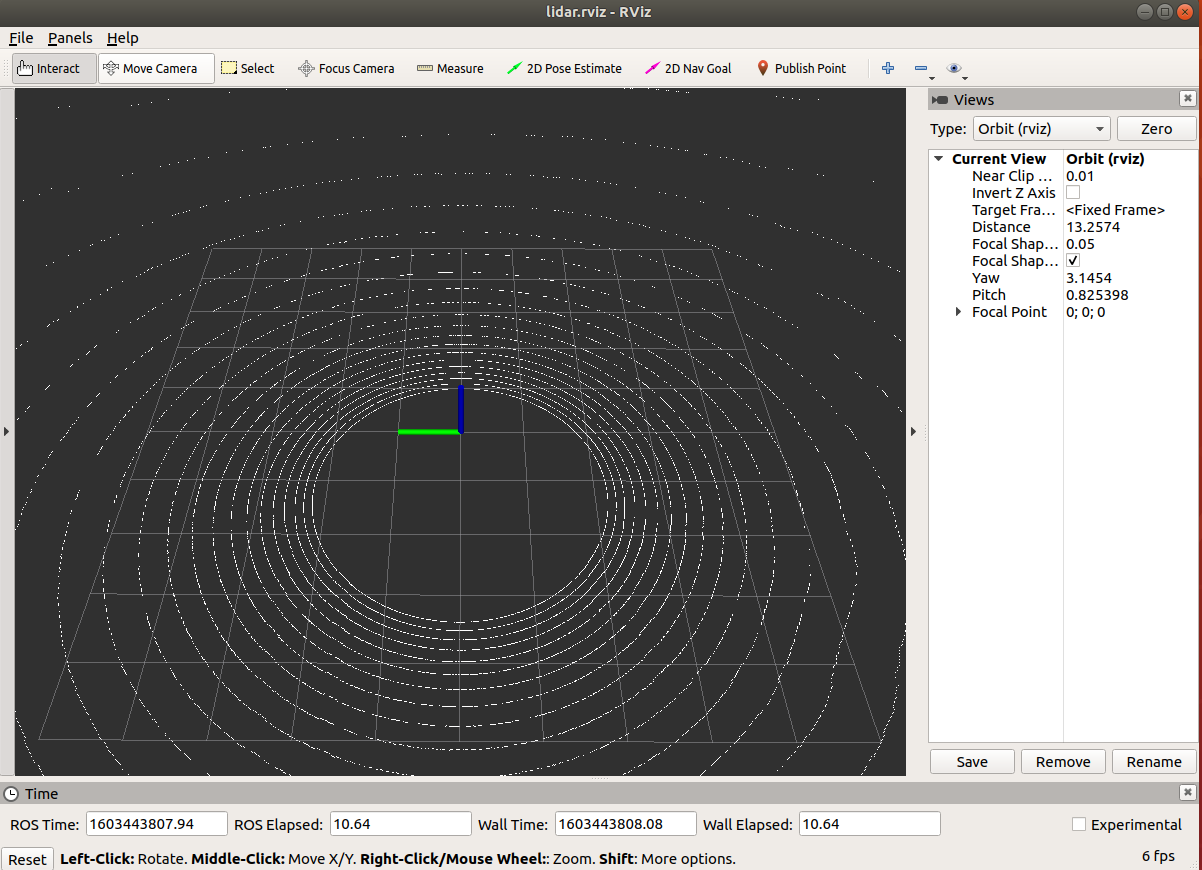
<실행 결과 Rviz에 출력>
카메라
시뮬레이터 센서 세팅은 아래와 같이 한다
$roslaunch rosbridge_server rosbridge_websocket.launch
$rosrun gen_ros camera.py
Local 환경에서 시뮬레이터를 실행시킨다면 Bridge IP 127.0.0.1 사용
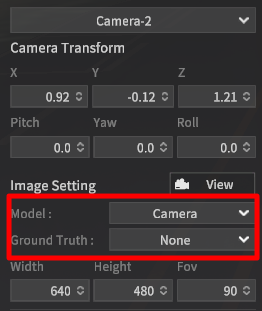
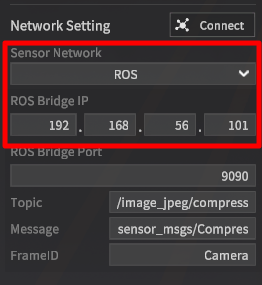
<시뮬레이터 센서 세팅>

<실행 결과 이미지 윈도우 생성>
GPS
시뮬레이터 센서 세팅은 아래와 같이 한다
$roslaunch rosbridge_server rosbridge_websocket.launch
$rosrun gen_ros gps.py
Local 환경에서 시뮬레이터를 실행시킨다면 Bridge IP 127.0.0.1 사용
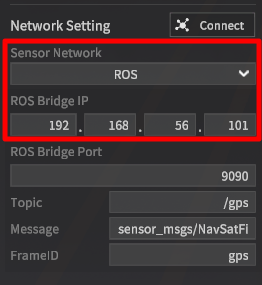
<시뮬레이터 센서 세팅>
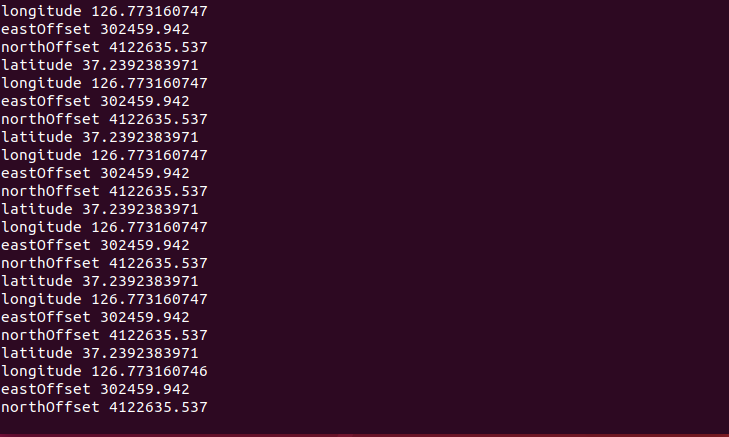
<실행 결과 콘솔창에 출력>
IMU
시뮬레이터 센서 세팅은 아래와 같이 한다
$roslaunch rosbridge_server rosbridge_websocket.launch
$rosrun gen_ros imu.py
Local 환경에서 시뮬레이터를 실행시킨다면 Bridge IP 127.0.0.1 사용
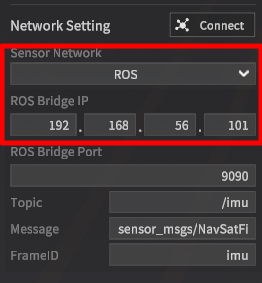
<시뮬레이터 센서 세팅>

<실행 결과 콘솔창에 출력>
주행 경로 제작
주행 코드 테스트
$ cd catkin_ws/src/erp_ros/launch/ && gedit path_maker.launch
arg “ (경로가 생성되는 폴더 이름) (생성할 경로의 파일 이름)”
$ roslaunch gen_ros path_maker.launch
원하는 경로를 주행한다
$ cd ~/catkin_ws/src/gen_ros/ && nautilus path
path_name.txt 파일이 완성된걸 확인 가능하다.
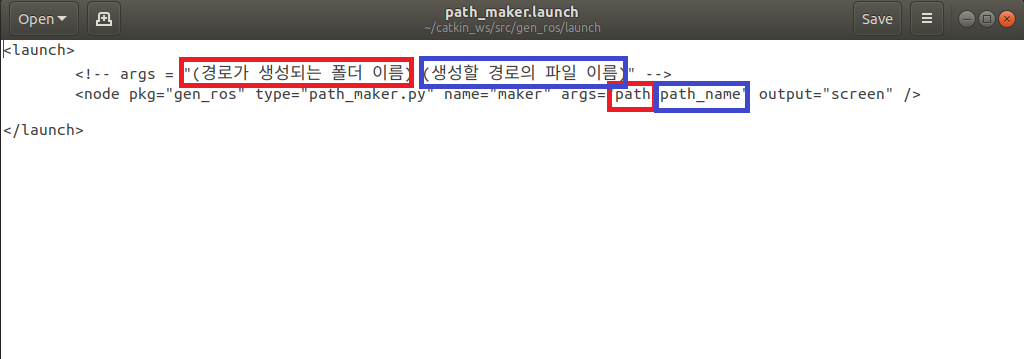
<Launch 파일 세팅>
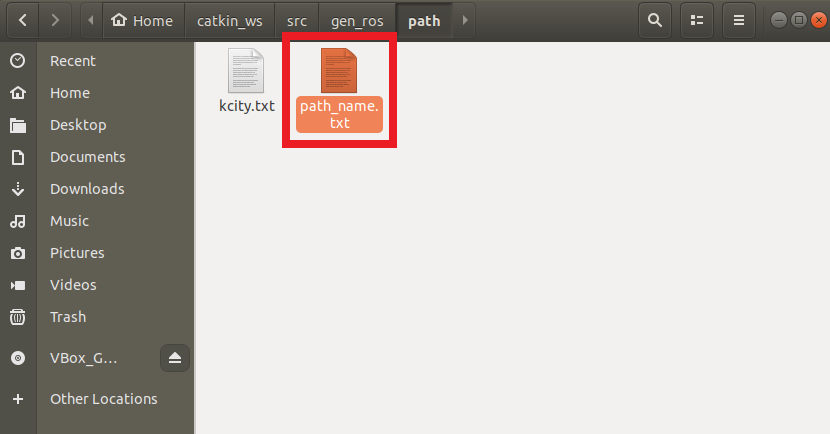
<생성된 경로 확인>
주행 코드 테스트
주행 코드 테스트
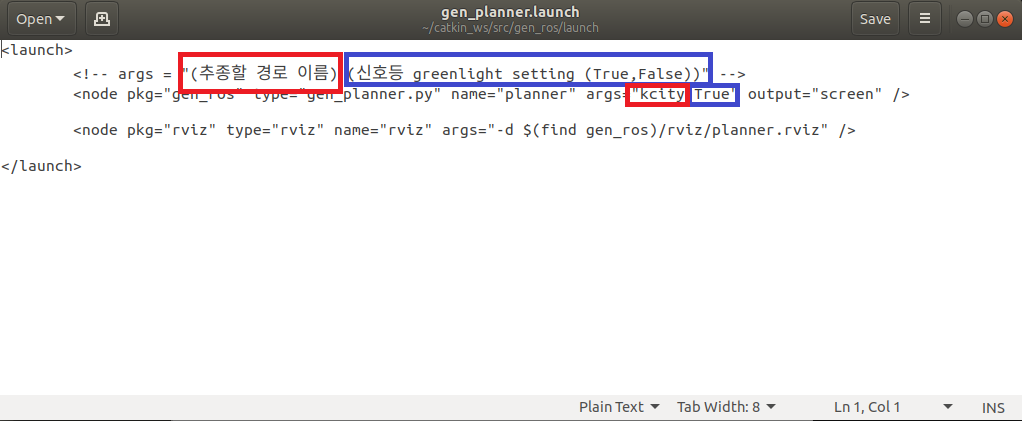
$ cd ~/catkin_ws/src/gen_ros/launch/ && gedit gen_planner.launch
arg “(추종할 경로 이름 입력) (신호등 GreenLight 세팅)”
(신호등 상태)부분을 True로 설정시 차량이 지나가는 경로의
신호를 Green Light로 바꿀 수 있다.$ roslaunch gen_ros gen_planner.launch
auto mode로 변경(키보드 ‘q’ 모드변경)
정해진 경로를 따라 주행
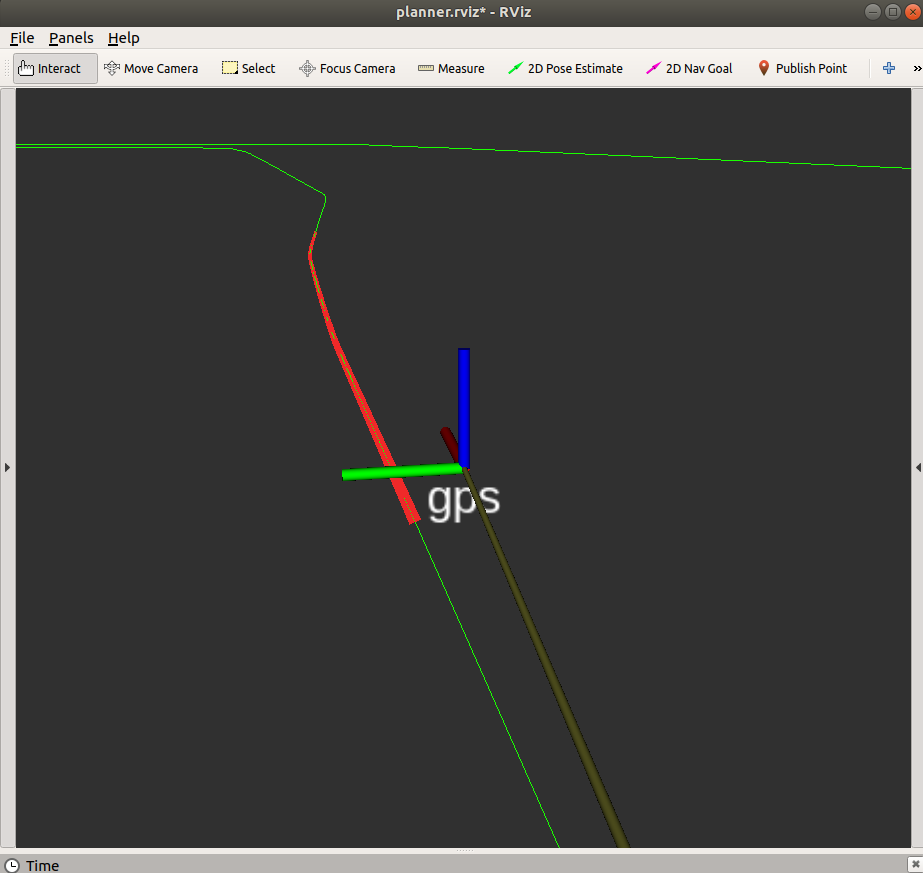
<실행 결과 Rviz 에 출력>